Jellibi Automated Guided Vehicle
이 저장소의 코드들은 격자형 맵위에서 빠레뜨를 원하는 위치로 옮기는 물류이송로봇의 기능들이 구현되어 있습니다. 2019 WCRC 1차 본선 종목 중 물류로봇 종목의 규정을 참고하였습니다.
JellibiAGV 는 아두이노 나노 호환보드를 중심으로 RFID TAG 를 인식하기 위하여 연결된 RFID 리더, 빠레뜨를 들어올리는 네개의 서보모터와 라인트레이서 구현에 필요한 두개의 IR 센서, 바퀴를 굴리기 위한 두개의 DC 모터로 구성됩니다.
코드는 src 디렉토리 아래에 총 다섯개의 샘플 프로젝트로 구성되어 있습니다.
00.UnitTest 폴더에는 H/W를 확인하고 조정하는데 도움을 주는 세개의 프로젝트가 있으며
01.Application 폴더에는 2019 WCRC 1차 본선 종목 중 물류로봇 종목의 시니어부 과제를 풀이한 Senior 샘플 프로젝트와 대학/일반부의 과제를 풀이한 Student 샘플 프로젝트가 있습니다.
이 프로젝트들을 빌드하여 AGV 에서 테스트 하기 위해서는 기본적인 아두이노 개발환경을 설치하고 USB 포트를 통하여 보드와 연결하고 코드를 다운로드 할 준비가 되어 있어야 합니다. 다음 단락에서는 코드를 이 저장소에서 내려받고 아두이노 개발툴에서 샘플을 AGV 로 다운로드 하는 방법을 설명합니다.
아두이노 툴을 다운로드하고 설치하는 방법은 다른 인터넷의 많은 가이드들을 참고하기 바랍니다.
 |
AGV 프로젝트는 라인트레이서기술을 응용하여 빠레뜨를 다음위치로 옮겨 마치 물류이송용 로봇을 구현합니다. AGV 보드는 아두이노 나노 호환보드를 중심으로 빠레뜨를 들어올리는 네개의 서보모터와 라인트레이서를 구현하기 위한 두개의 IR 센서 그리고 이동을 위한 두개의 DC 모터로 구성됩니다. |
|---|---|
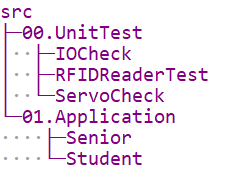 |
IOCheck : 기본적인 I/O 의 동작 상태를 확인 RFIDReaderTest : RFID Tag 를 읽어 RFID 를 구분 ServoCheck : Servo 모터를 제어하여 빠레뜨를 들어 올리기위한 축을 조정하는데 참고 Senior : 시니어부 규정에 따른 게임 샘플 Student : 대학/일반부 규정에 따른 게임 샘플 |
모든 코드는 Git 툴을 이용하거나 이 페이지에서 Zip 파일로 다운로드 할수 있습니다. 파일목록 바로 위의 버튼들 중 "Clone or download" 을 선택하여 "Download ZIP" 메뉴를 선택하면 이 코드저장소의 모든 파일을 다운로드 받을 수 있습니다. 데스크탑에서 다운받은 ZIP 파일을 압축 풀어 둡니다.
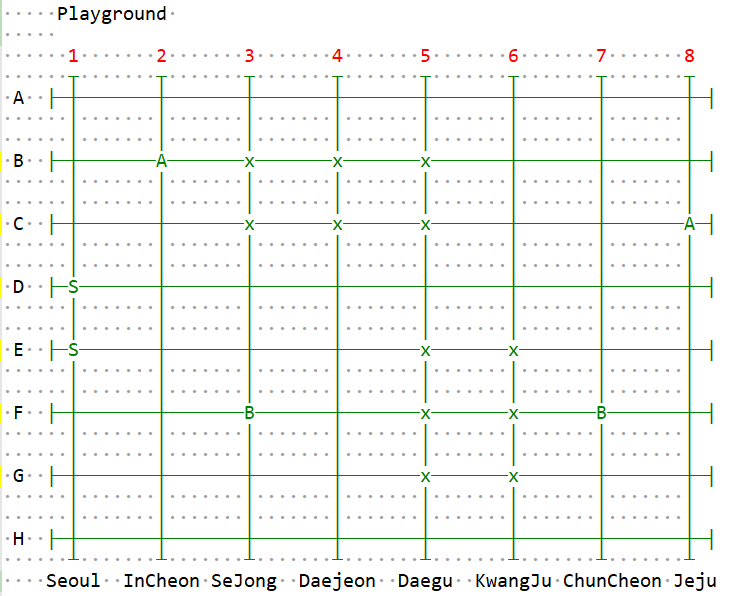
경기의 시작을 인식하거나 팔레트를 어느 위치로 배송하여야 하는지 구분하기 위하여 RFID 리더기를 사용합니다. AGV 는 경기장에서 RFID 를 계속해서 탐지 하고 "시작 RFID 태그" 를 인식하게 되면 우리가 코딩을 통해 정한 룰대로 움직입니다. 또, 팔레트 아래면에는 RFID 태그를 붙여두어 AGV 가 팔레트 아래로 이동하면 팔레트의 RFID 를 읽을 수 있도록 준비되어 있습니다.
이 RFID 리더기를 제어하기 위하여 사용하는 라이브러리는 아래 GitHub 주소에서 다운받습니다. 다운받은 라이브러리를 아두이노 툴에서 사용할 수 있도록 설치합니다.
RFID 리더 제어 코드 저장소 : https://github.com/miguelbalboa/rfid
라이브러리 다운받기 링크 : https://github.com/miguelbalboa/rfid/archive/master.zip
샘플 프로그램 중 IOCheck 는 측면의 사용자버튼의 동작을 감지하기 위하여 JellibiButton 라이브러리를 사용합니다. 아래 JellibiButton 라이브러리 저장소에서 코드를 다운로드 하고 아두이노 툴에 적용합니다.
JellibiButton 코드 저장소 : https://github.com/signaled/JellibiButton
라이브러리 다운받기 링크 : https://github.com/signaled/JellibiButton/archive/master.zip
JellibiAGV 오른쪽에는 코딩을 하는 PC 와 USB 로 연결할 수 있는 USB 포트가 하나 있으며 왼쪽 측면에는 코딩에서 사용할 수 있는 버튼과 전원을 켜고 끌 수 있는 스위치가 있습니다. 코딩한 결과물을 보드에 업로드 할 때에는 전원버튼을 앞쪽으로 밀어 전원을 켜둔 상태여야 합니다. 우선 JellibiAGV 는 전원을 켜두고 USB 케이블로 PC 와 JellibiAGV 를 연결합니다.
- 아두이노 툴에서 JellibiAGV 의 연결을 설정합니다. 보드 : Arduino Nano 프로세서 : ATmega328P (Old Bootloader) 포트 : JellibiAGV 와 연결된 시리얼 포트 선택
- 업로드를 선택하여 코드를 빌드하고 JellibiAGV 로 코드를 업로드합니다.
시니어부와 대학/일반부 두개의 프로젝트에 대한 코딩설명은 각 프로젝트의 README 파일을 참고하시기 바랍니다.