We have two different pointcloud demos which generate the pointcloud either on the OAK device or on the host computer (using open3d).
On-device Pointcloud NN model - Uses NN model to generate pointcloud from the depth on the OAK camera itself.
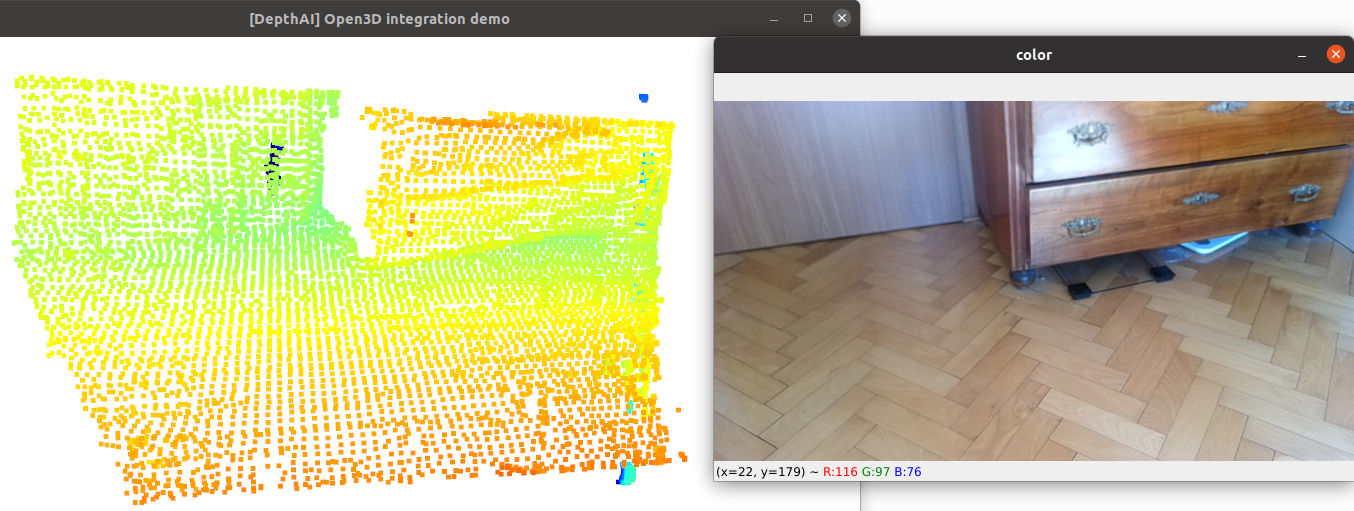
RGB-D projection - Uses open3d's PointCloud.create_from_depth_image() function to calculate pointcloud from the depth map on the host. It also supports colorized pointcloud.
