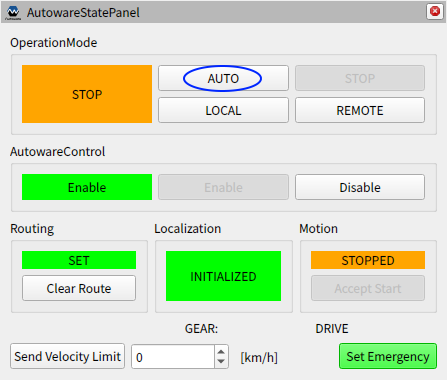
This plugin displays the current status of autoware. This plugin also can engage from the panel.
| Name | Type | Description |
|---|---|---|
/api/operation_mode/state |
autoware_adapi_v1_msgs::msg::OperationModeState |
The topic represents the state of operation mode |
/api/routing/state |
autoware_adapi_v1_msgs::msg::RouteState |
The topic represents the state of route |
/api/localization/initialization_state |
autoware_adapi_v1_msgs::msg::LocalizationInitializationState |
The topic represents the state of localization initialization |
/api/motion/state |
autoware_adapi_v1_msgs::msg::MotionState |
The topic represents the state of motion |
/api/autoware/get/emergency |
tier4_external_api_msgs::msg::Emergency |
The topic represents the state of external emergency |
/vehicle/status/gear_status |
autoware_vehicle_msgs::msg::GearReport |
The topic represents the state of gear |
| Name | Type | Description |
|---|---|---|
/api/operation_mode/change_to_autonomous |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to autonomous |
/api/operation_mode/change_to_stop |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to stop |
/api/operation_mode/change_to_local |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to local |
/api/operation_mode/change_to_remote |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to change operation mode to remote |
/api/operation_mode/enable_autoware_control |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to enable vehicle control by Autoware |
/api/operation_mode/disable_autoware_control |
autoware_adapi_v1_msgs::srv::ChangeOperationMode |
The service to disable vehicle control by Autoware |
/api/routing/clear_route |
autoware_adapi_v1_msgs::srv::ClearRoute |
The service to clear route state |
/api/motion/accept_start |
autoware_adapi_v1_msgs::srv::AcceptStart |
The service to accept the vehicle to start |
/api/autoware/set/emergency |
tier4_external_api_msgs::srv::SetEmergency |
The service to set external emergency |
/planning/scenario_planning/max_velocity_default |
tier4_planning_msgs::msg::VelocityLimit |
The topic to set maximum speed of the vehicle |
-
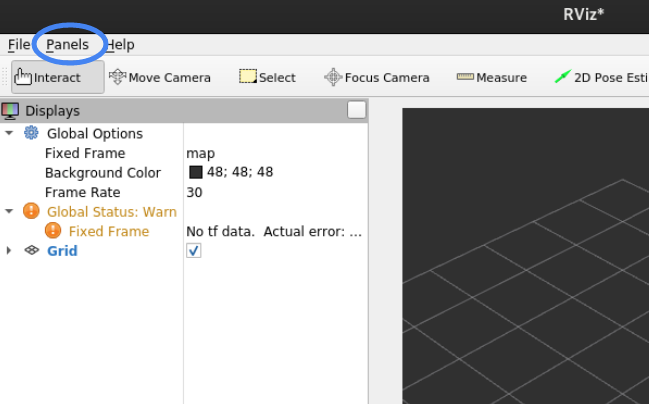
Start rviz and select panels/Add new panel.
-
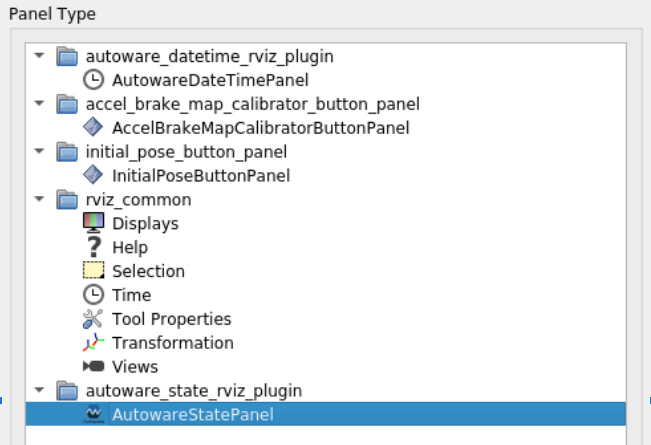
Select tier4_state_rviz_plugin/AutowareStatePanel and press OK.
-
If the auto button is activated, can engage by clicking it.