本パッケージは,ROS1とESP32を組み合わせて,センサ情報の収集やモータ制御を伴うロボットシステムを構築する基本的なサンプルとチュートリアルを提供するものである.
このパッケージを使うためには,Ubuntu 20.04 LTS が実行できるPC(MacやWindows上で仮想環境も可)とEspressif Systems社のArduino互換のマイコンであるESP32が必要である.
ネットワークを介した通信が必要ない場合はArduinoデバイスで代用することも可能である.
チュートリアルには以下のものが必要.
- Ubuntu 20.04LTSを実行可能なパソコン(仮想環境も可)
- ESP32マイコン(Espressif Systems, ESP32-DevKitC-32Eを推奨)
- ポテンショメータ
- DCモータ(ロータリーエンコーダ付きを推奨)
- DCモータモータドライバ
- 5V => 3.3V レベルコンバータ
- Wi-FiアダプタもしくはLANアダプタ(仮想環境を用いる場合)
-
ubuntu 20.04 LTSがインストールされたパソコン(仮想環境も可)を用意
仮想環境を用いる場合はWindowsではvmware workstation player,macではvmware fusion playerなどのアプリケーションが必要となる.また,ESP32をWi-Fi経由で仮想環境上のubuntuで動くrosと通信させる場合は,仮想環境を運用するホストPCがもつイーサネットやWi-Fiとは別にもう一つネットワークアダプタを用意すると便利である. Ubuntuの仮想環境の準備については,本パッケージ内のUbuntuの仮想環境をつくるを参照して欲しい.
-
ros1 noeticをインストール
-
ros1のコンパイラであるcatkinでROSのパッケージをコンパイルするためのcatkin workspaceの作成
-
Ubuntuのターミナルでcatkin workscape内でコンパイルしたパッケージを有効にする
$ echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrchttp://wiki.ros.org/ja/ROS/Tutorials/InstallingandConfiguringROSEnvironment
-
catkin workspace内にこのパッケージをclone 本パッケージは
ros1_learningという名前である.$ cd ~/catkin_ws/src $ git clone [email protected]:110kazuki/robot_programming_with_ros.git~/catkin_ws/src/ros1_with_esp32-mainが作成される. -
rosserialのインストール
$ sudo apt-get install ros-$(rosversion -d)-rosserial $ sudo apt-get install ros-$(rosversion -d)-rosserial-arduino -
Arduino IDEをインストール
Arduinoの開発環境を準備する. 以下のページからUbuntu用のインストローラをダウンロードする.ダウンロードされた圧縮ファイル(arduino-x.x.xx-linux64.tar.xz/arduino-x.x.xx)をhomeフォルダに解凍し,フォルダ名を分かりやすいように"arduino_ide"に変更しておく.
-
ESP32を使うためのArduinoライブラリをインストール
公式チュートリアルを参考にインストールを行う.https://docs.espressif.com/projects/arduino-esp32/en/latest/installing.html
Arduino IDEの[Arduino]タブ内の環境設定を開き, [追加のボードマネージャーのURL]に以下のURLを入力し[OK]をクリックする.

https://raw.githubusercontent.com/espressif/arduino-esp32/gh-pages/package_esp32_index.json続いて,[ツール]>[ボード:...]>[ボードマネージャ...]の順にクリックし,ボードマネージャを開く.
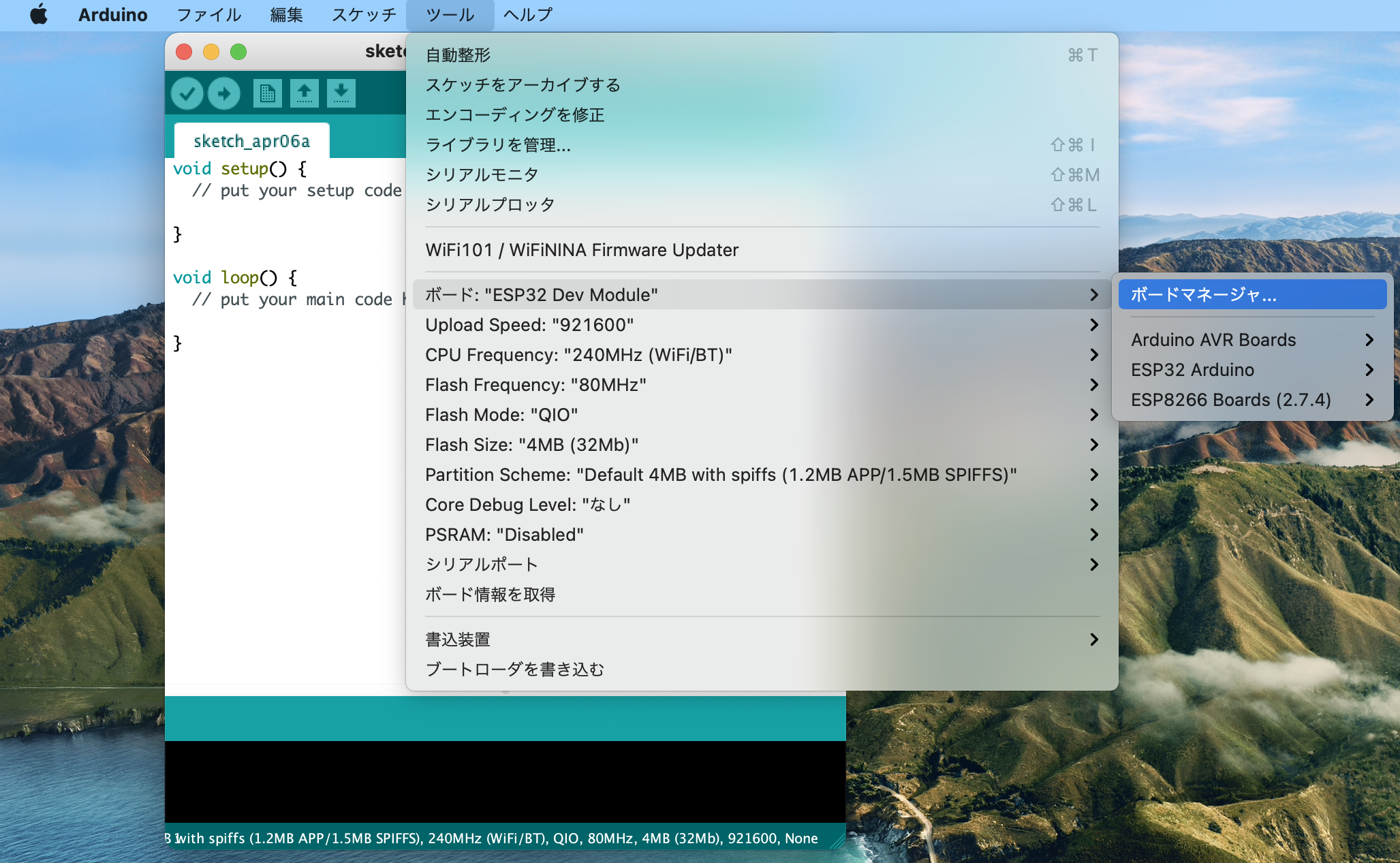
検索タブに"esp32"と入力し,Espressif Systemsのesp32の最新バージョンをインストールする.

最後に, [ツール]>[ボード:...]>[ESP32 Arduino]>[ESP32 Dev Module]を選択することで,Arduino IDEでESP32の開発を行うことができるようになる.
-
arduino用のros1ライブラリ(ros_lib)をコンパイル
ターミナルを2つ使用
ターミナル①$ roscoreターミナル②
$ mkdir ~/arduino_ros_lib $ cd ~/arduino_ros_lib $ rosrun rosserial_arduino make_libraries.py .~/arduino_ros_lib/ に新たにros_libというフォルダが作成される. このフォルダ内にArduino用の様々なパッケージで使用されるメッセージのヘッダーファイルが保存されている.
-
作成したros_libをArduino IDEのlibrariesディレクトリ内にコピー
cp -r ~/arduino_ros_lib/ros_lib ~/arduino_ide/libraries/ubuntu以外の環境でArduino IDEを使う場合はros_libフォルダを以下のディレクトリにコピーする.
- windows
arduino IDEがインストールされたディレクトリ(Program files(x86など)/Arduino/libraries/~ - mac
Applications/Arduino/Contents/Java/libraries/~
- windows



パッケージとは,ROSのコードを構成するソフトウエア構造の1単位である.各パッケージにはライブラリ、実行ファイルやスクリプト等が含まれる.
http://wiki.ros.org/ja/ROS/Tutorials/NavigatingTheFilesystem
パッケージのひな型はcatkinのコマンドを使って作成することができるが,プログラム内で使うライブラリにあわせてCMakeList.txt,package.xmlを編集する必要がある. CMakeList.txt,package.xmlに関してはこちらの記事がわかりやすくまとめられている.
-
パッケージの構成
package/
├ package.xml (http://wiki.ros.org/catkin/package.xml)
├ CMakeList.txt (http://wiki.ros.org/action/show/rosbuild/CMakeLists?action=show&redirect=CMakeLists)
├ include/
│ └ source folder for header file (.h)
├ src/
│ └ source folder for C++ nodes (.cpp)
├ scripts/
│ └ source folder for Python nodes (.py)
├ msg/
│ └ message files (.msg)
└ launch/
└ launch files (.launch) -
パッケージの作成
catkin_create_pkgコマンドを使ってパッケージの雛形を作成する.パッケージは先に作成したcatkin workspace 内のソースファイルフォルダ~/catkin_ws/srcに作成する.$ catkin_create_pkg [package名] [依存パッケージ1] … [依存パッケージN]依存パッケージには,'std_msgs','rospy','roscpp' などのrosの機能を使うためのライブラリを記述する. そのほかにも,pythonやC++のスクリプト内で使用するライブラリなどを記述しておくと良い.
以下のコマンドで,試しにpackage_make_testという名前のパッケージを作成してみる.
$ cd ~/catkin_ws/src $ catkin_create_pkg package_make_test std_msgs rospy roscpp~/catkin_ws/src内に"package_make_test"というフォルダが作成される.
package_make_test/
├ package.xml
├ CMakeList.txt
├ include/
└ src/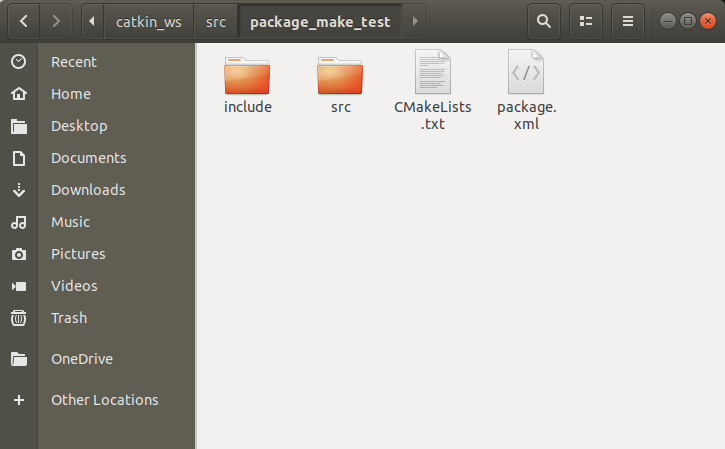
/scriptsや/msg,/launchは
catkin_create_pkgコマンドでは作成されないため,必要に応じて作成する. /msgや/launchが必要なタイミングは後述する.パッケージの作成に関して,詳しくはこちらを確認
-
パッケージのコンパイル
作成したパッケージのコンパイルにはros1専用のコンパイラであるcatkinを用いる. パッケージのコンパイルは以下のコマンドを実行する.$ cd ~/catkin_ws $ catkin_makecatkin_makeコマンドを実行すると~/catkin_ws/srcの中にある全てのパッケージがコンパイルされる. 特定のパッケージのみをコンパイルする場合は以下のコマンドを実行する.$ catkin_make --only-pkg-with-deps target_package_nameたとえば,このパッケージだけをコンパイルするなら
$ catkin_make --only-pkg-with-deps ros1_learning

rosserialは、シリアル通信経由でROSのメッセージをホストPCとArduinoデバイス間でやり取りするためのパッケージ. USB接続でのシリアル通信だけでなく,Wi-Fiを利用したシリアル通信も行うことができる.
-
ubuntuでESP32をUSBシリアル経由で扱うための前準備
ubuntuではESP32などのArduinoデバイスをUSBシリアルで接続するたびに許可属性(アクセス権限)を付与する必要がある. これを行わない限りスケッチの書き込みやシリアルポートを利用できない. 許可属性の設定を行うのは面倒なので,自動で許可属性が設定されるようにする.-
arduinoデバイスをUSBケーブルでubuntuに接続している場合はケーブルを抜く
-
カーネルが出力するdmesgコマンド履歴をクリア
$ sudo dmesg -c -
arduinoをUSBでubuntuに接続
仮想環境を使用している場合はホストPCから仮想環境へ接続を移す -
dmesgコマンド履歴を確認する
$ sudo dmesgarduinoデバイスをubuntuに接続したときのデバイス名は主に"ttyUSB*",もしくは"ttyACM*" (*は数字)となる.

この時はESP32-DevKitC-32Eを接続するとデバイス名が"ttyUSB0"となった.
念のため,ハードウェアデバイスが登録されているディレクトリ /dev/~ にも確認したデバイス名が存在するかチェック$ ls /dev/ttyUSB* #ttyACM*の場合は /dev/ttyACM*
/dev/ttyUSB0が存在していることが確認できる.
-
一時的な許可属性の付与
ESP32の接続を解除するまで有効な許可属性の付与は以下のコマンドで行うことができる.$ sudo chmod 666 /dev/ttyUSB* # *部分は確認したデバイス名と一致させる -
arduinoデバイスを特定する情報を調べる
特定のarduinoデバイスを接続したとき,許可属性を付与するデバイスを自動的に認識させるために,デバイス固有の情報(ベンダーやシリアル番号等)を得る必要がある.$ udevadm info -q property -n /dev/ttyUSB0 | grep -E "ID_SERIAL_SHORT|ID_VENDOR_ID=|ID_MODEL_ID="
表示された"ID_MODEL_ID","ID_SERIAL_SHORT","ID_VENDOR_ID"の値をメモしておく
-
arduinoデバイスごとの許可属性を自動付与するためのudev設定ファイル(.rulesファイル)の作成
$ cd /etc/udev/rules.d/ $ sudo touch 99-serial.rules $ sudo gedit 99-serial.rules #vimのテキストエディタで開いてもOKテキストエディタが開かれるので,以下の情報を記述する.
ATTRS{idVendor}=“xxxx”の部分は先に控えた"ID_VENDOR_ID",ATTRS{idProduct}==“xxxx”は"ID_MODEL_ID",ATTRS{serial}==“xxx~”は"ID_SERIAL_SHORT"の値に置き換える. また,"name~"の部分は"設定したいデバイス名(例えば,ESP32_NO1)に置き換える.SUBSYSTEM=="tty", ATTRS{idVendor}=="xxxx", ATTRS{idProduct}=="xxxx", ATTRS{serial}=="xxx~", SYMLINK+="name~", MODE="0666"複数のarduinoデバイスを同時に登録することも可能である.その場合はあらかじめそれぞれのデバイスの固有情報を調べておき,同じスクリプト内に上記のコマンドを複数列挙する. 例えば,
#ESP32 NO.1 SUBSYSTEM=="tty", ATTRS{idVendor}="xxxx", ATTRS{idProduct}=="xxxx", ATTRS{serial}=="xxx~", SYMLINK+="name~", MODE=“0666” #ESP32 NO.2 SUBSYSTEM=="tty", ATTRS{idVendor}="yyyy", ATTRS{idProduct}=="yyyy", ATTRS{serial}=="yyy~", SYMLINK+="name~", MODE="0666" -
udev設定ファイルを反映
$ sudo /etc/init.d/udev reload再起動をおこなう.
$ sudo reboot以上でarduinoデバイスの許可属性が自動で設定されるようになる.
-
-
rosserialを使ってみる
rosserialはrosのパッケージであるため,実行前にroscoreを別のターミナルで立ち上げておく必要がある.ターミナル①
$ roscorerosserialの実行 ターミナル② デバイス名は先にudev設定ファイルで設定したもの,_baud:=xxxのxxx部分はarduinoのスケッチ内で設定されているシリアルのボーレートと一致させる.
$rosrun rosserial_python serial_node.py _port:=/dev/デバイス名 _baud:=xxx以上でarduinoのスケッチをrosの一つのノードとして扱うことができるようになる. 上手く接続されているかを確認するにはrqt_graphというコマンドを使う.
$ rqt_graphrqt_graphは現在ros上で実行されているノードを可視化し,さらにノード間のメッセージのやりとりを矢印で図示してくれる便利なコマンドである.
|画像用意|



ESP32から一定間隔で"Hello world!"というテキストをメッセージで送信し,ホストのubuntu PCで受け取ってみる. メッセージはトピック(ノード間における一方向で非同期方式のメッセージ送受信方式)で送信する.
-
arduino IDEでパッケージ内のtest_hello_world.inoをESP32に書き込む. もしここで,「ros.h」がincludeされてないとコンパイルエラーが出た場合は,Arduino IDEの「ライブラリを管理」から,Michael Furguson氏の『Rosserial Arduino Library』の最新版をインストールする.
-
ESP32をubuntuにUSBで接続
-
rosserialでESP32に接続
ターミナル①$ roscoreターミナル②
$ rosrun rosserial_python serial_node.py _port:=/dev/デバイス名 _baud:=57600 #デバイス名は先にudev設定ファイルで設定したもの -
ESP32からメッセージが配信されているかを確認
ターミナル③$ rostopic echo /chatter$ rostopic echo /topic_nameは配信されているメッセージ内容を確認することができるコマンド.
一定間隔で data: "Hello world!" と表示されていれば,ESP32からのメッセージを受け取れている.|画像用意|
rostopicコマンドはトピックに関する様々な情報を得ることができる便利コマンド
-
rostopic list
配信されているトピックを列挙することができる. -
rostopic echo /topic_name
配信されている特定のトピックの内容を確認することができる. -
rostopic info /topic_name
配信されている特定のトピックがどのような型で構成されているかなどの情報を確認することができる. -
rostopic hz /topic_name
配信されている特定のトピックがどの程度の周期で配信されているかを確認することができる. -
rostopic pub /topic_name package/message_type value
メッセージを手動で配信するコマンド
rostopicにはその他にも様々な機能がある
ros1では様々な形式のメッセージ型があらかじめ用意されており,メッセージとして送信したいデータにあわせてメッセージ型を選択ことができる.例えば,"ESP32からHello worldしてみる"の回で使用した文字列を格納するためのstd_msgs/String.msg,整数を格納するためのstd_msgs/Int64.msg,ロボットの平進や回転の速度(各3自由度)を格納するための6つの変数がひと塊になったgeometry_msgs/Twist.msg,クオータニオンに4つのパラメータを保存するgeometry_msgs/Quaternion.msgなど,ほかにも数多くのメッセージ型が用意されている.
http://wiki.ros.org/std_msgs
http://wiki.ros.org/geometry_msgs
一方で,最適なメッセージ型が存在しない場合や可読性の向上の目的で自分でメッセージ型を定義することができる.
オリジナルのメッセージは次の手順で作成することができる.
-
パッケージ内にメッセージファイル(.msg)を作成
今回は一つのアナログセンサの信号をAD変換(整数)して得られたデジタル値を格納するメッセージを想定して作成し,メッセージ名(フィールドタイプ)はSensorAD.msgとする. (当然ながら,1つの整数を保存するならばstd_msg/Int16などで十分である.)$ cd ~/catkin_ws/src/ros1_with_esp32/msg $ touch SensorAD.msgメッセージにはすべての文字が半角かつ先頭が必ずアルファベットで,以後は英数字とアンダースコアのみで命名するという決まりがあり,またファイル形式は".msg"となる.また,慣習的に先頭の文字は大文字であることが多い.詳しくは以下のリンクを確認.
-
作成したメッセージファイルをテキストエディタで開き,必要な変数(コンテンツ)を定義
コンテンツはファイルの中で以下のように記述する.contents_type contents_nameこの時,各変数の型はあらかじめ存在するメッセージ型を使用し,std_msgsで定義されている基本的な型を組み合わせる. また,あらかじめコンテンツの初期値を決めておくことができる.
contents_type contents_name = init_val今回の用途では12bit程度の整数値を格納できれば十分であるので,std_msgsで定義されているint16型をcontents_typeとして用いる. メッセージファイル(SensorAD.msg)の中身は以下
int16 ad_val -
作成したメッセージをコンパイル
作成したメッセージはros1のコンパイラであるcatkinを用いてパッケージ全体をコンパイルすることで用いることができるようになる. メッセージのコンパイルに際しては,CMakeList.txtとpackage.xmlにメッセージをコンパイルする際に使用するパッケージの依存関係等を追記する必要がある. > http://wiki.ros.org/ja/ROS/Tutorials/CreatingMsgAndSrv
> https://qiita.com/srs/items/7ac023c549e585caeed0本パッケージに収録しているCMakeList.txtとpackage.xmlはメッセージをコンパイルするための修正を加えている.
package.xmlへの追記
<build_depend>message_generation</build_depend> <exec_depend>message_runtime</exec_depend>パッケージのコンパイルは次のコマンドでおこなう.
$ cd ~/catkin_ws $ catkin_make -
コンパイル後にメッセージ型が使用可能になったかを確認
rosmsg showというコマンドで作成したメッセージ型がrosによって認識されているかを確認する.rosmsg showの使い方は次の通り:$ rosmsg show [package_name/Maked_massage]ここでは,以下:
$ rosmsg show ros1_learning/SensorAD次のように表示されれば成功.
int16 ad_val
本パッケージのarduino/sensor_data_publisherのスケッチで自作したメッセージを実際に使用してみる. sensor_data_publisher.inoは,ESP32でアナログセンサ(例えばポテンショメータなど)のシグナルをAD変換し, そのデジタル値を先ほど作成したint16型の変数をもつメッセージを使ってrosserial経由でホストPCへと送るためのサンプルプログラムである.
-
自作メッセージをarduino IDEで使うためにros_libを再度コンパイル
自作したメッセージをarduinoデバイスで用いるには,まずは,本項の初期設定の"arduino用のros1ライブラリ(roslib)を コンパイル"で紹介した手順を再度実行する必要がある.また,sensor_data_publisher.inoをESP32以外のarduinoデバイス(arduino UNO, nano, megaなど)で用いる場合は スケッチの先頭にあるrosライブラリのインクルード方法を次のように変更する必要がある.
//For ESP32 //#undef ESP32 //コメントアウト //#include <ros.h> //USB serial mode //コメントアウト //#define ESP32 //コメントアウト //For general arduino device #include <ros.h> //USB serial mode //コメントアウト解除仮想環境上でarduino IDEをインストールしてESP32書き込みを行う場合は,
arduino_IDE/libraries/~に直接ros_libを作成すると良い.
ターミナル①roscoreターミナル②
cd ~/arduino_IDE/libraries/ #arduino IDEをホームディレクトリにインストールし,フォルダ名がarduino_IDEの場合 rosrun rosserial_arduino make_libraries.py .ros_libを作成した後,roslibフォルダ内に
ros_lib/ros1_learning/SensorAD.hが作成されていれば 自作メッセージをArduinoデバイスで用いることができるようになる.作成したros_libをArduino IDEのlibrariesディレクトリに保存する. -
ESP32の準備 ESP32-DevKitC-32Eの34ピンにポテンショメータなどのアナログセンサのシグナル線を接続する.また,センサの動作に必要な線(VCC, GNDなど)も接続しておく. アナログセンサの配線が完了したら,Arduino IDEでESP32にsensor_data_publisher.inoをESP32に書き込む.
-
rosserialでESP32をノードとしてrosに接続
先に説明した手順rosserialの使い方に従い,rosserialでESP32を一つのノードとしてrosに接続する.ターミナル①
roscoreターミナル②
rosrun rosserial_python serial_node.py _port:=/dev/デバイス名 _baud:=57600 -
rqt_graphでESP32がノードとして働いていることを確認
ターミナル③rqt_graph||画像用意|
-
rostopicでESP32から配信されているメッセージを確認
rostopic echoコマンドでESP32から配信されているメッセージの内容を確認する. メッセージ名はスケッチ内の以下の行にて"sensor_ad"で定義されている.ros::Publisher pub("sensor_ad", &SensorAD);ターミナル④
rostopic echo /sensor_adアナログセンサのシグナルをAD変換したデジタル値(12bit, 0~4095)が受信できていれば成功.
|画像用意|
ESP32にモータドライバを接続し,PWM信号でモータドライバを制御してDCモータを回転させてみる.
[注意]
DCモータは高い電流・電圧を入力で扱うため以下の点に注意する
- 回路に配線ミスや短絡が起こるとESP32やパソコンを損傷する可能性があるので,配線を十分に確認すること.
- モータドライバやDCモータの仕様以上の電圧を印加しない.
- モータドライバのモータ電源入力と電源の間に非常停止スイッチなどを入れておくことを推奨する.
-
ESP32にモータドライバ制御用のスケッチを書き込む
モータドライバによってDCモータの制御方法が異なるため,使用するモータドライバの仕様を確認し,本パッケージの/arduino/motor_control/~からモータドライバに合わせたスケッチを選択しESP32に書き込む.
モータドライバの制御方式の種類については以下を参考にしてほしい.https://tattatatakemori.hatenablog.com/entry/2017/07/20/232827
-
Sign/Magnitude/Break PWM方式,SparkFun ROB-1445,TOSHIBA TA7291P など (サポート予定)
使用するスケッチ :arduino/motor_control/motor_control_type_smb/motor_control_type_smb.ino -
Locked Anti-Phase PWM方式
使用するスケッチ :arduino/motor_control/motor_control_type_smb/motor_control_type_lap.inoESCONシリーズ (DCモータドライバ)を使い場合は以下
arduino/motor_control/motor_control_type_smb/motor_control_escon.ino
なお,モータドライバの仕様によってPWMの周波数や使用するデューティ比のレンジ,回転方向を指定するピンの印加電圧(HIGH/LOW)を調整する必要がある. また,高機能なモータドライバにはPWMや回転方向の制御入力以外に,モータドライバの有効/無効をデジタル入力などで指定する必要があるものもある(maxon motor社のESCONシリーズなど)ので注意して欲しい.
本チュートリアルでおすすめのモータドライバを紹介しておく.
- Cytron 4V~16V DCモータードライバ(Sign/Magnitude/Break PWM方式)
- SmartDriveDuo-10 (Sign/Magnitude/Break PWM方式/Locked Anti-Phase PWM方式)
-
-
配線を行う ESP32とモータドライバ間の配線ミスや短絡に十分注意して配線を行う.
モータドライバとESP32間の配線は使用するスケッチによって異なる.[Sign/Magnitude/Break PWM方式]
(サポート予定)
信号線 ピン番号 PWM 17 [Locked Anti-Phase PWM方式]
信号線 ピン番号 PWM 17 Enable 18 -
rosからモータの司令値を配信する
ターミナル① roscoreを起動
roscoreターミナル② rosserialでESP32をrosに接続
rosrun rosserial_python serial_node.py _port:=/dev/デバイス名 _baud:=57600ターミナル③ モータの司令値を配信
最後の引数の整数値はモータの回転速度を-100~100の整数値で指定する.
逆転 : -100(最大速度) ~ 0(停止)
正転 : 0(停止) ~ 100(最大速度)rostopic pub motor_ctrl std_msgs/Int16 50 #最後の引数は-100~100の任意の整数
前項で手動で配信したモータの回転速度を司令するメッセージの代わりに,キーボードの入力で司令値を変化させるノードで司令値を配信してモータの回転速度を変化させてみる.
-
rosパッケージをコンパイル
キーボード入力でモータの司令値を変化させるノードはmotor_cmd_keyでC++で実装されている. ソースファイルは本パッケージのsrc/motor_cmd_key.cpp.$ cd catkin_ws $ catkin_make --only-pkg-with-deps ros1_learning -
ノードを起動
ターミナル① roscoreの起動$ roscoreターミナル② rosserialを起動してESP32をrosに接続
$ rosrun rosserial_python serial_node.py _port:=/dev/デバイス名 _baud:=57600ターミナル③
motor_cmd_keyノードを起動$ rosrun ros1_learning motor_cmd_keyターミナル④ 司令値のメッセージ(/motor_ctrl)を確認
$ rostopic echo /motor_ctrl[
motor_cmd_keyノードの操作方法 ]- 上・下の矢印キーで司令値を5%ずつ変化
- スペースキーで司令値が0% (緊急停止)
- q でノードを終了