-
Notifications
You must be signed in to change notification settings - Fork 0
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
- Loading branch information
1 parent
221ca4b
commit 0a28b12
Showing
42 changed files
with
3,784 additions
and
0 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,2 @@ | ||
| build** | ||
| data/gmapping.bag |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,46 @@ | ||
| # GMapping | ||
|
|
||
| > G. Grisetti, C. Stachniss and W. Burgard, "Improved Techniques for Grid Mapping With Rao-Blackwellized Particle Filters," in IEEE Transactions on Robotics, vol. 23, no. 1, pp. 34-46, Feb. 2007, doi: 10.1109/TRO.2006.889486. | ||
| ## Introduction | ||
|
|
||
| The most codes in this repository were adapted from [here](https://github.com/Wleisure95/laser_slam), while the original codes of gmapping can be found [here](https://github.com/ros-perception/openslam_gmapping). Note that most redundant codes in the original repository were not kept and I used more modern C++ to rewrite the codes in [Google style](https://google.github.io/styleguide/cppguide.html). | ||
|
|
||
| ## Dependencies | ||
|
|
||
| - [ROS](http://wiki.ros.org/ROS/Installation) | ||
| - [glog](https://github.com/google/glog) | ||
|
|
||
| ## Compilation | ||
|
|
||
| ```bash | ||
| mkdir -p ~/laser_slam_ws/src | ||
| cd ~/laser_slam_ws/src/ | ||
| git clone [email protected]:TongLing916/gmapping_clean.git | ||
| cd .. | ||
| catkin_make -j | ||
| ``` | ||
|
|
||
| ## Execution | ||
|
|
||
| ```bash | ||
| # Terminal 1 | ||
| cd ~/laser_slam_ws | ||
| source devel/setup.bash | ||
| roslaunch gmapping gmapping_sim.launch | ||
| ``` | ||
|
|
||
| ```bash | ||
| # Terminal 2 | ||
| cd ~/laser_slam_ws/src/gmapping_clean/data | ||
| rosbag play --clock gmapping.bag | ||
| ``` | ||
|
|
||
| ```bash | ||
| # Terminal 3 | ||
| rosrun rviz rviz | ||
| ``` | ||
|
|
||
| ## Demo | ||
|
|
||
| 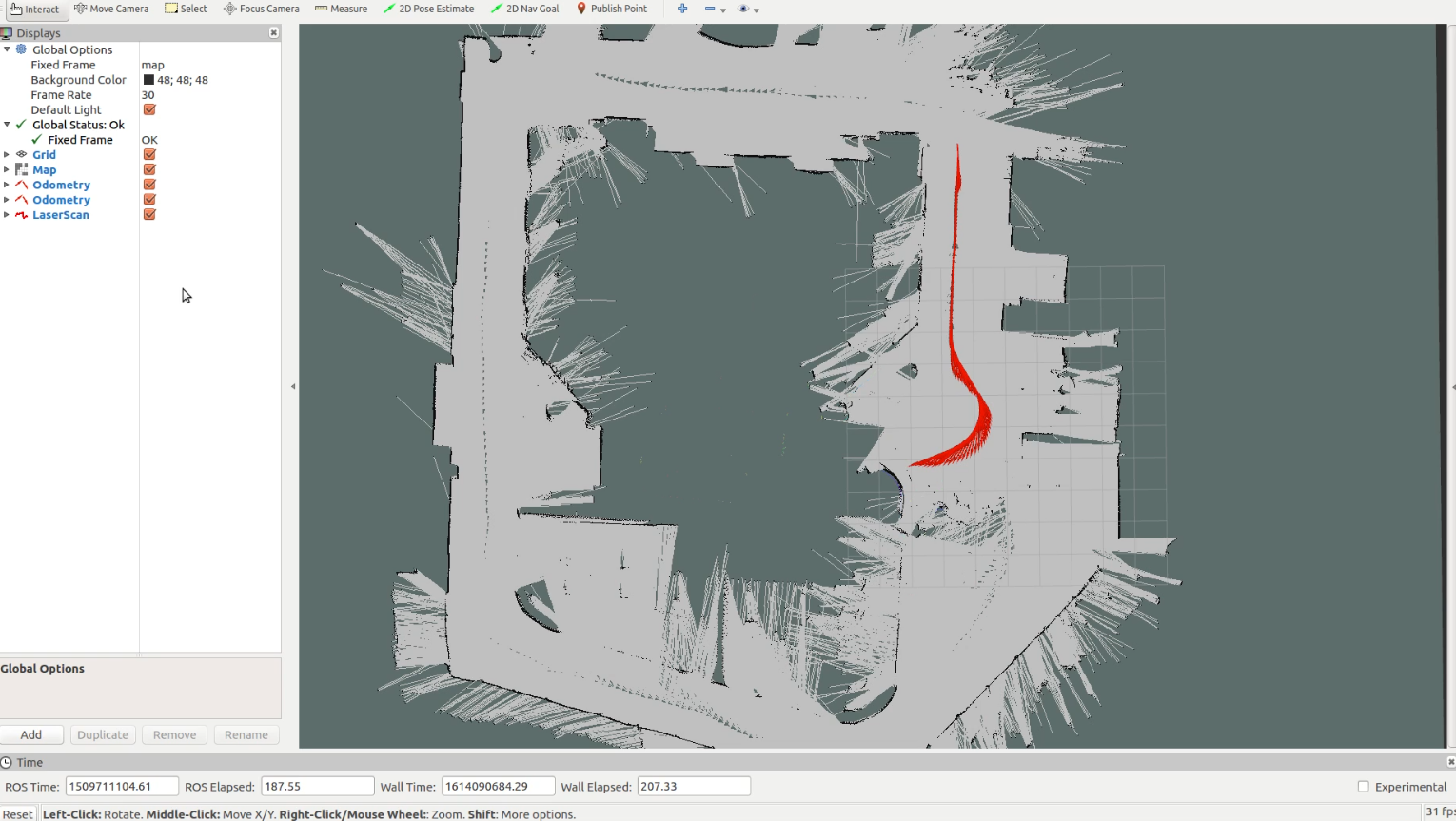 |
{kind=link}
Loading
Sorry, something went wrong. Reload?
Sorry, we cannot display this file.
Sorry, this file is invalid so it cannot be displayed.
Binary file not shown.
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,37 @@ | ||
| cmake_minimum_required(VERSION 2.8.3) | ||
| project(gmapping) | ||
|
|
||
| set(CMAKE_BUILD_TYPE "Release") | ||
| set(CMAKE_CXX_FLAGS "-std=c++14 -O3 -Wall") | ||
|
|
||
| find_package(catkin REQUIRED | ||
| COMPONENTS | ||
| roscpp | ||
| rospy | ||
| std_msgs | ||
| tf | ||
| sensor_msgs | ||
| nav_msgs | ||
| openslam_gmapping | ||
| ) | ||
|
|
||
| catkin_package( | ||
| INCLUDE_DIRS include | ||
| ) | ||
|
|
||
| include_directories( | ||
| ${PROJECT_SOURCE_DIR}/include | ||
| ${PROJECT_SOURCE_DIR}/../openslam_gmapping/include | ||
| ${catkin_INCLUDE_DIRS} | ||
| ) | ||
|
|
||
| add_executable(${PROJECT_NAME}_node | ||
| app/main.cc | ||
|
|
||
| src/slam_gmapping.cc | ||
| ) | ||
|
|
||
| target_link_libraries(${PROJECT_NAME}_node | ||
| -pthread | ||
| ${catkin_LIBRARIES} | ||
| ) |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,22 @@ | ||
| #include <glog/logging.h> | ||
| #include <ros/ros.h> | ||
|
|
||
| #include "slam_gmapping.h" | ||
|
|
||
| int main(int argc, char** argv) { | ||
| google::InitGoogleLogging("GMapping"); | ||
| google::InstallFailureSignalHandler(); | ||
| FLAGS_alsologtostderr = true; | ||
| FLAGS_colorlogtostderr = true; | ||
|
|
||
| ros::init(argc, argv, "gmapping_node"); | ||
|
|
||
| gmapping::SlamGMapping gm; | ||
| gm.StartLiveSlam(); | ||
|
|
||
| ros::spin(); | ||
|
|
||
| google::ShutdownGoogleLogging(); | ||
|
|
||
| return 0; | ||
| } |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,156 @@ | ||
| #pragma once | ||
|
|
||
| #include <memory> | ||
| #include <mutex> | ||
| #include <string> | ||
| #include <thread> | ||
|
|
||
| #include <message_filters/subscriber.h> | ||
| #include <nav_msgs/GetMap.h> | ||
| #include <ros/publisher.h> | ||
| #include <ros/ros.h> | ||
| #include <ros/service_server.h> | ||
| #include <ros/subscriber.h> | ||
| #include <sensor_msgs/LaserScan.h> | ||
| #include <tf/message_filter.h> | ||
| #include <tf/transform_broadcaster.h> | ||
| #include <tf/transform_listener.h> | ||
|
|
||
| #include "grid_fast_slam/grid_slam_processor.h" | ||
| #include "sensor/odometry_sensor.h" | ||
| #include "sensor/range_sensor.h" | ||
| #include "type/oriented_point.h" | ||
|
|
||
| namespace gmapping { | ||
|
|
||
| class SlamGMapping { | ||
| public: | ||
| enum Status { kUnknown = -1, kFree = 0, kOccupied = 100 }; | ||
|
|
||
| public: | ||
| SlamGMapping(); | ||
|
|
||
| void StartLiveSlam(); | ||
|
|
||
| private: | ||
| void Initialize(); | ||
|
|
||
| bool InitializeMapper(const sensor_msgs::LaserScan& scan); | ||
|
|
||
| bool MapCallBack(nav_msgs::GetMap::Request& req, | ||
| nav_msgs::GetMap::Response& res); | ||
|
|
||
| void LaserCallBack(const sensor_msgs::LaserScan::ConstPtr& scan); | ||
|
|
||
| void PublishLoop(const double transform_publish_period); | ||
|
|
||
| void PublishTransform(); | ||
|
|
||
| bool AddScan(const sensor_msgs::LaserScan& scan, | ||
| OrientedPoint2d* const odom_pose); | ||
|
|
||
| /** | ||
| * @brief Update map using the particle with max weight | ||
| * @details This function is just for visualization. | ||
| */ | ||
| void UpdateMap(const sensor_msgs::LaserScan& scan); | ||
|
|
||
| double ComputePoseEntropy(); | ||
|
|
||
| bool GetOdomPose(const ros::Time& t, OrientedPoint2d* const pose); | ||
|
|
||
| int GetMapIdx(const int s, const int x, const int y) { return s * y + x; } | ||
|
|
||
| private: | ||
| ros::NodeHandle private_nh_; | ||
|
|
||
| tf::Transform map_2_odom_; | ||
| std::mutex map_2_odom_mtx_; | ||
| int laser_cnt_; | ||
|
|
||
| unsigned long seed_; | ||
|
|
||
| bool got_first_scan_; | ||
| bool got_map_; | ||
| std::mutex map_mtx_; | ||
| nav_msgs::GetMap::Response map_; | ||
|
|
||
| std::shared_ptr<GridSlamProcessor> grid_slam_processor_; | ||
| std::shared_ptr<RangeSensor> range_sensor_; | ||
| std::shared_ptr<OdometrySensor> odometry_sensor_; | ||
|
|
||
| std::shared_ptr<tf::TransformBroadcaster> tf_broadcaster_; | ||
|
|
||
| std::shared_ptr<std::thread> th_transfrom_; | ||
| std::shared_ptr<message_filters::Subscriber<sensor_msgs::LaserScan>> | ||
| scan_filter_sub_; | ||
| std::shared_ptr<tf::MessageFilter<sensor_msgs::LaserScan>> scan_filter_; | ||
|
|
||
| ros::NodeHandle nh_; | ||
| ros::Publisher entropy_publisher_; | ||
| ros::Publisher map_publisher_; | ||
| ros::Publisher map_metadata_publisher_; | ||
| ros::ServiceServer dynamic_map_server_; | ||
| tf::TransformListener tf_; | ||
|
|
||
| /** | ||
| * @brief The angles in the laser, going from -x to x | ||
| * @details Adjustment is made to get the laser between symmetrical bounds as | ||
| * that's what gmapping expects. | ||
| */ | ||
| std::vector<double> laser_angles_; | ||
|
|
||
| // Parameters used by ROS wrapper | ||
| int throttle_scans_; | ||
| std::string base_frame_; | ||
| std::string laser_frame_; | ||
| std::string map_frame_; | ||
| std::string odom_frame_; | ||
| double transform_publish_period_; | ||
| double tf_delay_; | ||
| ros::Duration map_update_interval_; | ||
|
|
||
| // Parameters used by GMapping | ||
| double max_range_; // Laser's max range | ||
| double max_urange_; // Laser's max usable range | ||
| double minimum_score_; // Minimum score for considering matching outcome good | ||
| double sigma_; // Variance for computing score | ||
| int kernel_size_; // Size of searching window when computing score | ||
| double lstep_; // Linear step size for optimization | ||
| double astep_; // Angular step size for optimization | ||
| int iterations_; // Number of optimization iterations | ||
| double lsigma_; // Variance for computing likelihood | ||
| double ogain_; // Smoothing factor for the likelihood | ||
| int lskip_; // Number of beams we skip when computing likelihood | ||
| double srr_; // Linear error's variance due to linear motion | ||
| double srt_; // Angular error's variance due to linear motion | ||
| double str_; // Linear error's variance due to angular motion | ||
| double stt_; // Angular error's variance due to angular motion | ||
| double linear_update_; | ||
| double angular_update_; | ||
| double temporal_update_; | ||
| double resample_threshold_; | ||
| int num_particles_; | ||
| double xmin_; | ||
| double ymin_; | ||
| double xmax_; | ||
| double ymax_; | ||
|
|
||
| /** Map resolution */ | ||
| double delta_; | ||
|
|
||
| double occ_thresh_; | ||
| double ll_sample_range_; // Translational sampling range | ||
| double ll_sample_step_; // Translational sampling step | ||
| double la_sample_range_; // Angular sampling range | ||
| double la_sample_step_; // Angular sampling step | ||
|
|
||
| size_t laser_beam_cnt_; | ||
| bool do_reverse_range_; | ||
|
|
||
| // The pose in the original laser frame, of the corresponding centered laser | ||
| // with z facing up | ||
| tf::Stamped<tf::Pose> centered_laser_pose_; | ||
| }; | ||
|
|
||
| } // namespace gmapping |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,57 @@ | ||
| <launch> | ||
|
|
||
| <param name="use_sim_time" value="true"/> | ||
| <arg name="scan_topic" default="sick_scan" /> | ||
|
|
||
| <node pkg="gmapping" type="gmapping_node" name="gmapping_node" output="screen"> | ||
|
|
||
| <remap from="scan" to="$(arg scan_topic)"/> | ||
|
|
||
| <!-- GMapping Wrapper paremeters --> | ||
| <param name="throttle_scans" value="1"/> | ||
| <param name="base_frame" value="base_link" /> | ||
| <param name="odom_frame" value="odom"/>-- | ||
| <param name="map_update_interval" value="5.0"/> <!-- Map update rate --> | ||
|
|
||
| <!-- Laser Parameters --> | ||
| <param name="maxRange" value="5.51" /> <!-- Laser max range --> | ||
| <param name="maxUrange" value="5.5"/> <!-- Laser max usable range --> | ||
| <param name="sigma" value="0.05"/> <!-- Scan matching - gaussian sigma --> | ||
| <param name="kernelSize" value="1"/> <!-- Scan matching - search window size --> | ||
| <param name="lstep" value="0.05"/> <!-- Scan matching - linear step size --> | ||
| <param name="astep" value="0.05"/> <!-- Scan matching - angular step size --> | ||
| <param name="iterations" value="5"/> <!-- Scan matching - pptimization iterations --> | ||
| <param name="lsigma" value="0.075"/> <!-- Scan matching - likelihood sigma --> | ||
| <param name="ogain" value="3.0"/> <!-- Likelihood gain --> | ||
| <param name="lskip" value="0"/> <!-- Beam skip size --> | ||
| <param name="minimumScore" value="50"/> <!-- scan matching - threshold to accept matching --> | ||
|
|
||
| <!-- Motion model parameters --> | ||
| <param name="srr" value="0.01"/> <!-- Translational error due to translation --> | ||
| <param name="srt" value="0.005"/> <!-- Angular error due to translation --> | ||
| <param name="str" value="0.01"/> <!-- Translational error due to rotation --> | ||
| <param name="stt" value="0.005"/> <!-- Angular error due to rotation --> | ||
|
|
||
|
|
||
| <!-- Other parameters --> | ||
| <param name="linearUpdate" value="0.2"/> <!-- Linear threshold for processing scan --> | ||
| <param name="angularUpdate" value="0.2"/> <!-- Angular threshold for processing scan --> | ||
| <param name="temporalUpdate" value="5"/> <!-- Temporal threshold for processing scan --> | ||
| <param name="resampleThreshold" value="0.5"/> <!-- Threshold of effective particle' percentage --> | ||
| <param name="particles" value="30"/> <!-- Number of particles --> | ||
|
|
||
| <!-- Likelihood sampling parameters --> | ||
| <param name="llsamplerange" value="0.02"/> <!-- Range of linear sampling --> | ||
| <param name="llsamplestep" value="0.02"/> <!-- Step of linear sampling --> | ||
| <param name="lasamplerange" value="0.005"/> <!-- Range of angular sampling --> | ||
| <param name="lasamplestep" value="0.005"/> <!-- Step of angular samplinp --> | ||
|
|
||
| <!-- Map size and resolution --> | ||
| <param name="xmin" value="-1.0"/> | ||
| <param name="ymin" value="-1.0"/> | ||
| <param name="xmax" value="1.0"/> | ||
| <param name="ymax" value="1.0"/> | ||
| <param name="delta" value="0.025"/> | ||
|
|
||
| </node> | ||
| </launch> |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,35 @@ | ||
| <package> | ||
| <name>gmapping</name> | ||
| <version>1.3.8</version> | ||
| <description>This package contains a ROS wrapper for OpenSlam's Gmapping. | ||
| The gmapping package provides laser-based SLAM (Simultaneous Localization and Mapping), | ||
| as a ROS node called slam_gmapping. Using slam_gmapping, you can create a 2-D occupancy | ||
| grid map (like a building floorplan) from laser and pose data collected by a mobile robot. | ||
| </description> | ||
| <author>Brian Gerkey</author> | ||
| <maintainer email="[email protected]">Vincent Rabaud</maintainer> | ||
| <license>CreativeCommons-by-nc-sa-2.0</license> | ||
|
|
||
| <url>http://ros.org/wiki/gmapping</url> | ||
|
|
||
| <buildtool_depend version_gte="0.5.68">catkin</buildtool_depend> | ||
|
|
||
| <build_depend>nav_msgs</build_depend> | ||
| <build_depend>openslam_gmapping</build_depend> | ||
| <build_depend>roscpp</build_depend> | ||
| <build_depend>rostest</build_depend> | ||
| <build_depend>tf</build_depend> | ||
| <build_depend>nodelet</build_depend> | ||
| <build_depend>message_generation</build_depend> | ||
|
|
||
| <run_depend>nav_msgs</run_depend> | ||
| <run_depend>openslam_gmapping</run_depend> | ||
| <run_depend>roscpp</run_depend> | ||
| <run_depend>tf</run_depend> | ||
| <run_depend>nodelet</run_depend> | ||
| <run_depend>message_runtime</run_depend> | ||
|
|
||
| <export> | ||
| <nodelet plugin="${prefix}/nodelet_plugins.xml" /> | ||
| </export> | ||
| </package> |
Oops, something went wrong.