Motion capture technologies are crucial for reconstructing human movements and have applications across various domains. This project introduces a novel approach to fine-grained motion capture (i.e., deformation capture), leveraging a configurable self-sensing IMU sensor network to effectively bridge the gap between traditional vision-based and IMU-based methods.
The research on motion capture technologies can be broadly categorized into two methods: vision-based and IMU-based. While vision-based methods offer high accuracy in capturing complex 3D geometrical deformations, they rely on costly optical equipment and are limited by the line-of-sight occlusion problem. On the other hand, IMU-based methods are more lightweight but struggle to accurately capture fine-grained 3D deformations.
Our work presents a configurable self-sensing IMU sensor network designed to bridge the gap between vision-based methods and IMU-based methods. By proposing a novel kinematic chain model and introducing three geometric priors, our approach enhances the accuracy of 3D deformation capture.
- Kinematic Chain Model: A new model based on the four-bar linkage is proposed to describe the minimum deformation process of 3D deformations accurately.
- Geometric Priors: Utilization of initial shape, material properties, and motion features as geometric priors to assist the kinematic chain model in reconstructing deformations.
- Customizable 3D Sensor Networks: A fabrication method for customizing 3D sensor networks for different objects, inspired by origami, facilitating a 3D–2D–3D digital–physical transition.
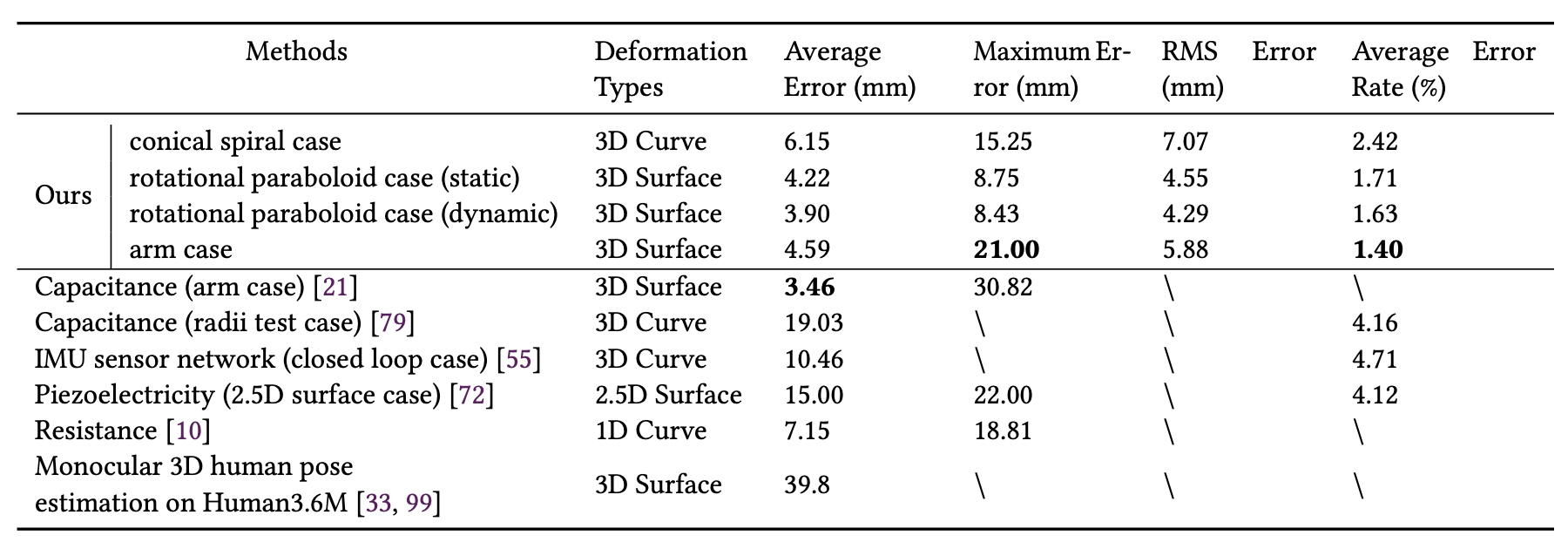
Our experimental results indicate that the proposed method's performance is on par with current state-of-the-art methods, representing a positive step forward in the field of deformation capture technology.
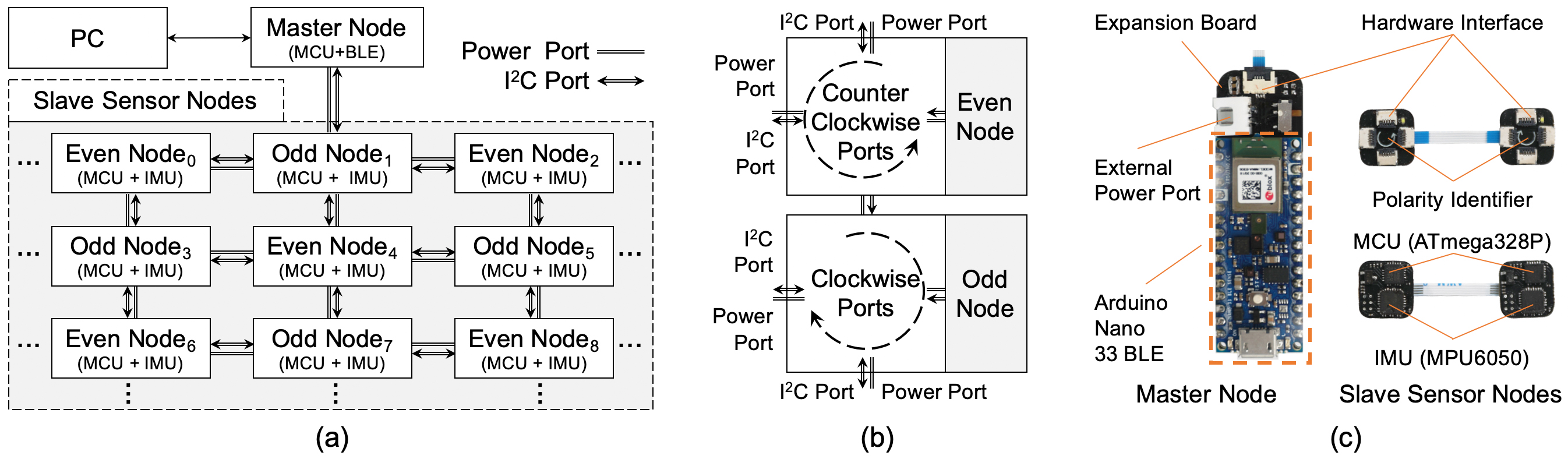
The architecture of the sensor network and its hardware implementation.
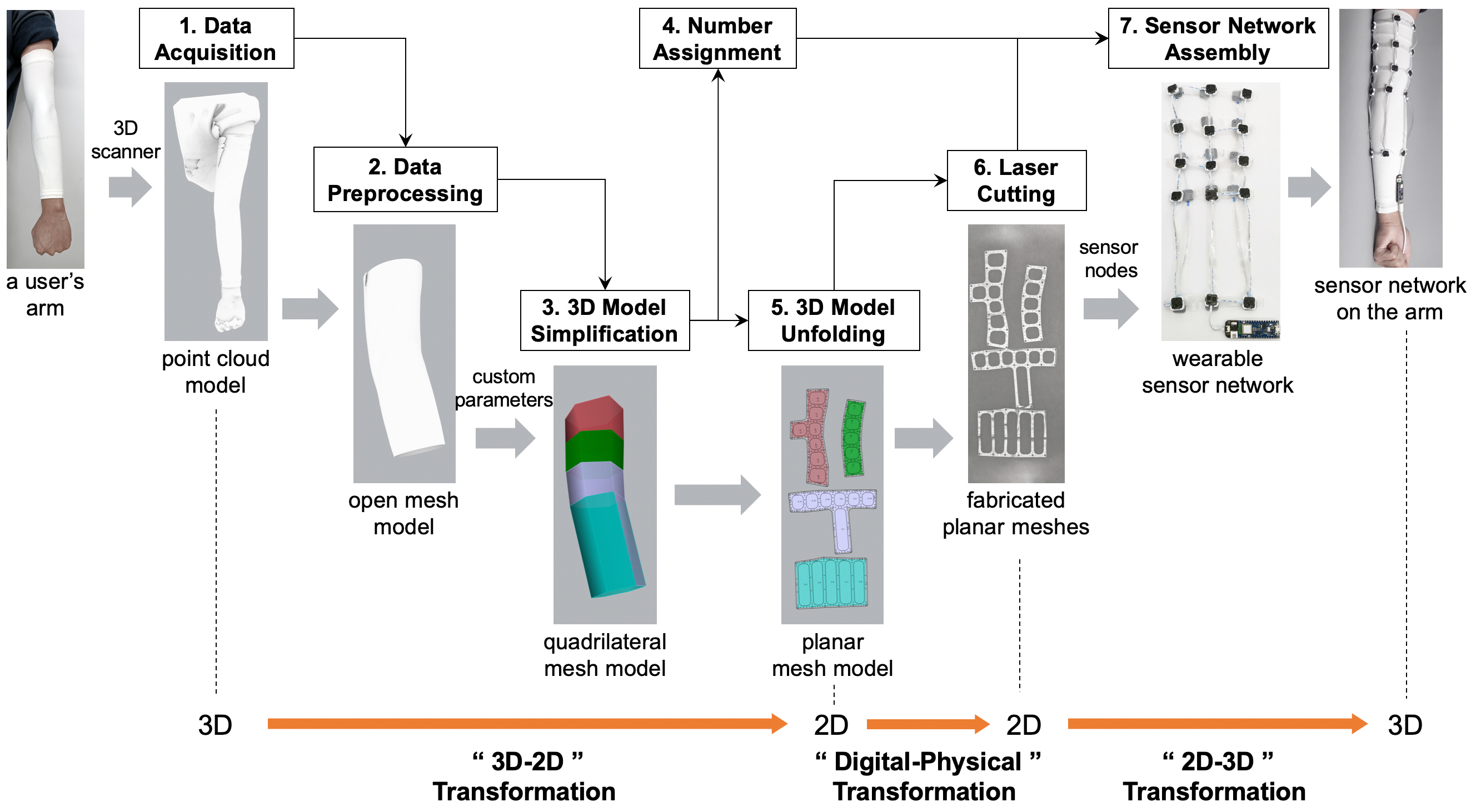
The customized construction pipeline of a wearable 3D sensor network.
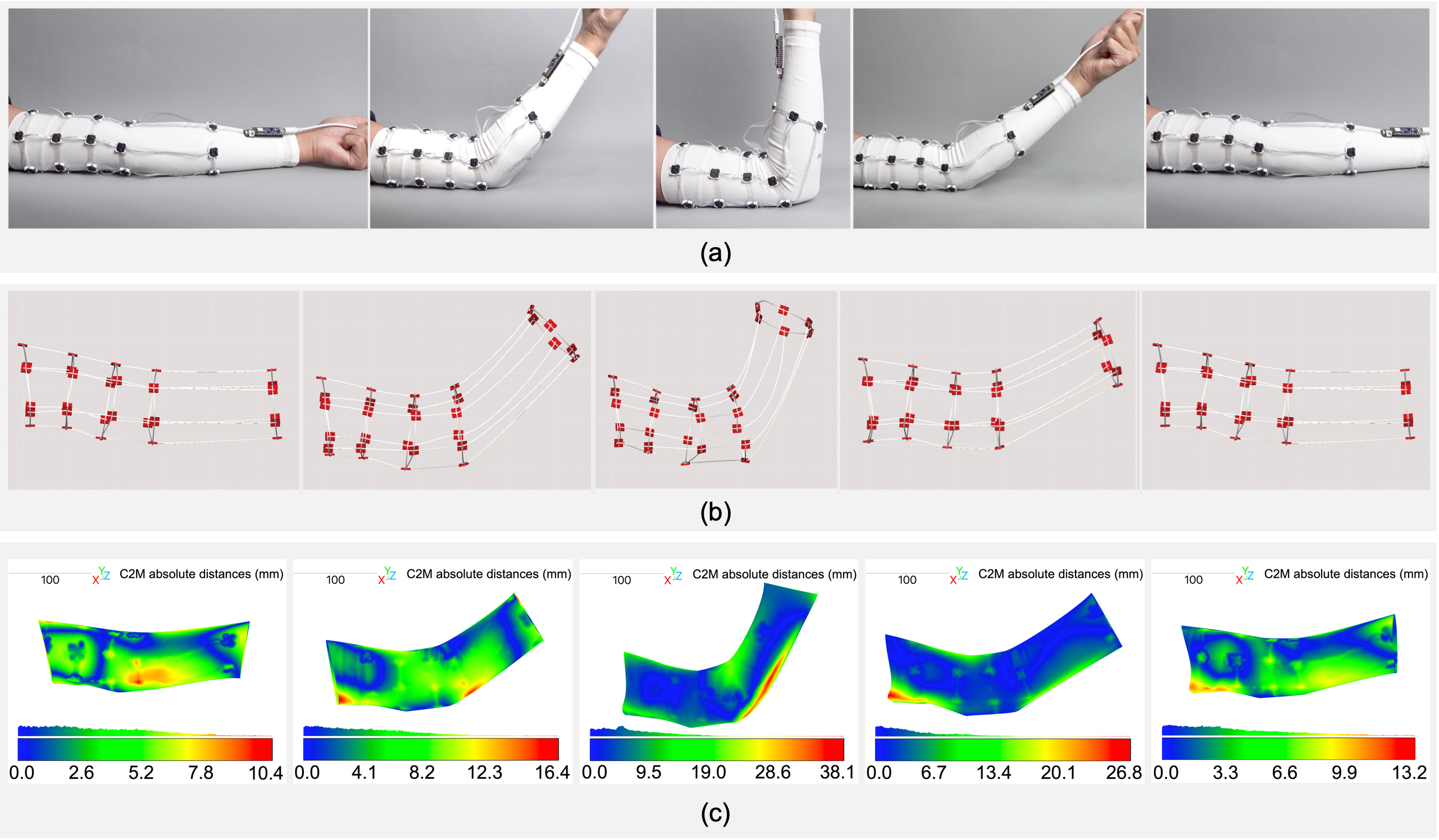
Arm test prototypes demonstrating the application of the sensor network.
Zihong Zhou, Pei Chen, Yinyu Lu, Qiang Cui, Deying Pan, Yilun Liu, Jiaji Li, Yang Zhang, Ye Tao, Xuanhui Liu, Lingyun Sun, and Guanyun Wang. 2023. 3D Deformation Capture via A Configurable Self-Sensing IMU Sensor Network. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 7, 1, Article 42 (March 2023), 24 pages. https://doi.org/10.1145/3580874