Pegasus Simulator is a framework built on top of NVIDIA Omniverse and Isaac Sim. It is designed to provide an easy yet powerful way of simulating the dynamics of vehicles. It provides a simulation interface for PX4 integration as well as a custom python control interface. At the moment, only multirotor vehicles are supported, with support for other vehicle topologies planned for future versions.
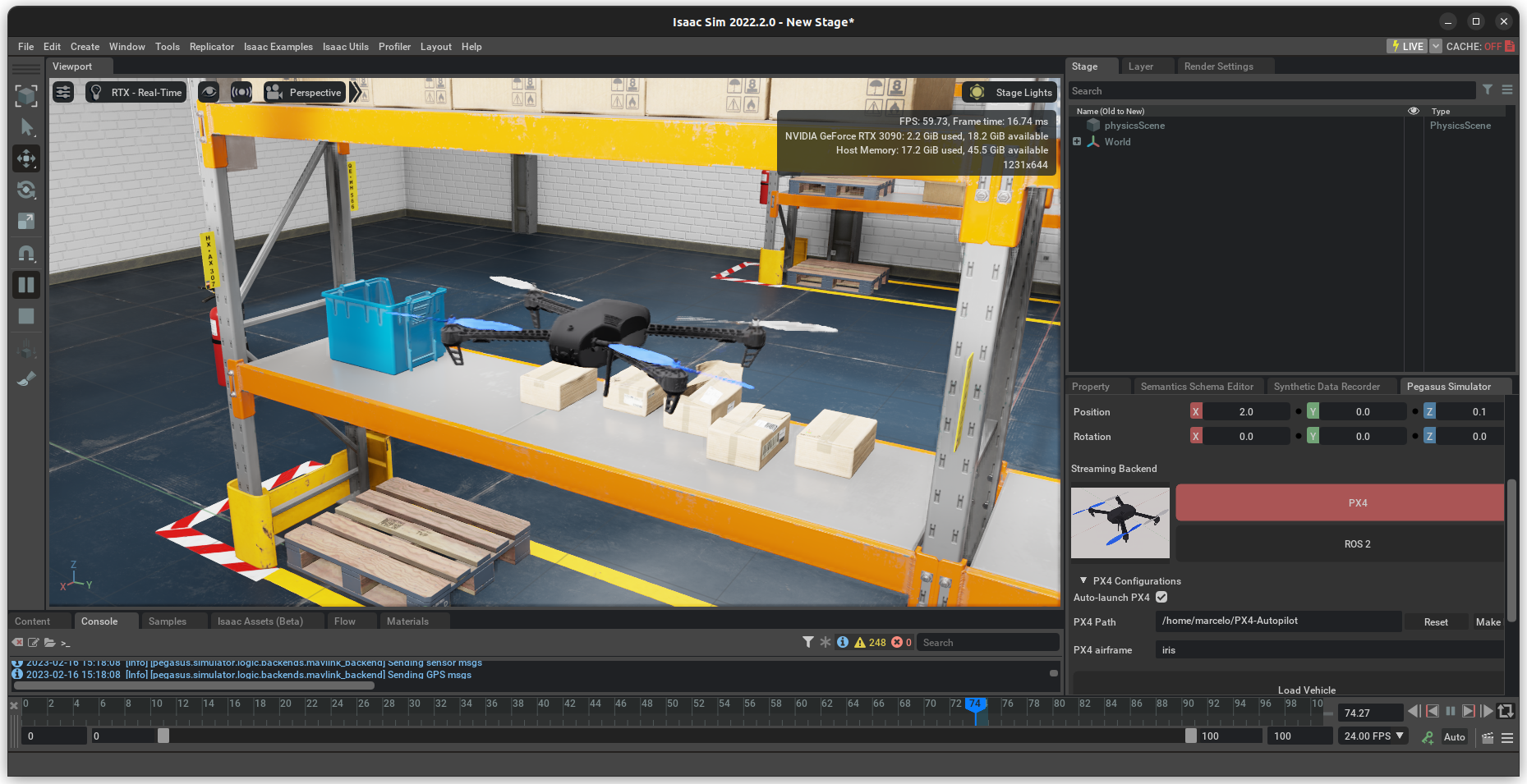
Check the provided documentation here to discover how to install and use this framework.
- 2024-08-02: Pegasus Simulator v4.1.0 is released for Isaac 4.1.0. This version is NOT compatible with older versions of Isaac Sim.
If you find Pegasus Simulator useful in your academic work, please cite the paper below. It is also available here.
@INPROCEEDINGS{10556959,
author={Jacinto, Marcelo and Pinto, João and Patrikar, Jay and Keller, John and Cunha, Rita and Scherer, Sebastian and Pascoal, António},
booktitle={2024 International Conference on Unmanned Aircraft Systems (ICUAS)},
title={Pegasus Simulator: An Isaac Sim Framework for Multiple Aerial Vehicles Simulation},
year={2024},
volume={},
number={},
pages={917-922},
keywords={Simulation;Robot sensing systems;Real-time systems;Sensor systems;Sensors;Task analysis},
doi={10.1109/ICUAS60882.2024.10556959}}
This simulation framework is an open-source effort, started by me, Marcelo Jacinto in January/2023. It is a tool that was created with the original purpose of serving my Ph.D. workplan for the next 4 years, which means that you can expect this repository to be mantained, hopefully at least until 2027.
- Project Founder
- Marcelo Jacinto, under the supervision of Prof. Rita Cunha and Prof. Antonio Pascoal (IST/ISR-Lisbon)
- Architecture
- Multirotor Dynamic Simulation and Control
- Example Applications
Also check the always up-to-date Github contributors list with all the open-source contributors.
In parallel to this project, the Pegasus (GNC) guidance, control, and navigation project serves as the foundation control code for performing real-world experiments for my Ph.D. More information can be found at this link: Pegasus GNC
An high level project roadmap is available here.
We welcome new contributions from the community to improve this work. Please check the Contributing section in the documentation for the guidelines on how to help improve and support this project.
- Use Discussions for discussing ideas, asking questions, and requests features.
- Use Issues to track work in development, bugs and documentation issues.
- Use Pull Requests to fix bugs or contribute directly with your own ideas, code, examples or improve documentation.
Pegasus Simulator is released under BSD-3 License. The license files of its dependencies and assets are present in the docs/licenses directory.
NVIDIA Isaac Sim is available freely under individual license.
PX4-Autopilot is available as an open-source project under BSD-3 License.
- Dynamics Systems and Ocean Robotics (DSOR) group of the Institute for Systems and Robotics (ISR), a research unit of the Laboratory of Robotics and Engineering Systems (LARSyS).
- Instituto Superior Técnico, Universidade de Lisboa
The work developed by Marcelo Jacinto and João Pinto was supported by Ph.D. grants funded by Fundação para a Ciência e Tecnologia (FCT).
![]()
![]()
![]()
![]()
![]()