Feature detection and mapping using classical algorithms to locate an image of an object in the target image.
From this application it is possible to solve several problems in the area of Computer Vision, such as: image recovery, motion tracking, motion structure detection, object detection, recognition and tracking, 3D object reconstruction, and others.
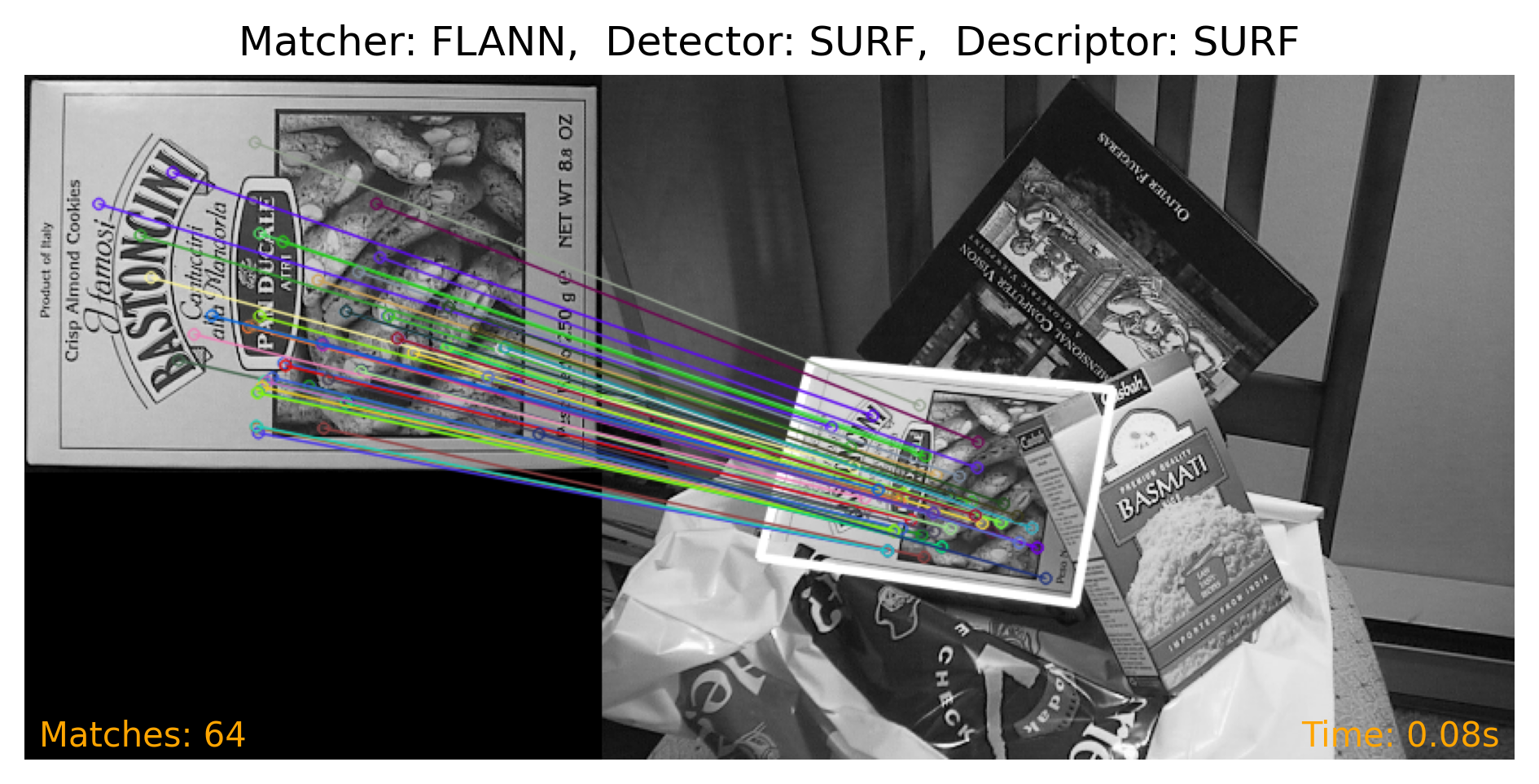
This project performs Feature Detection and Matching with SIFT, SURF, KAZE, BRIEF, ORB, BRISK, AKAZE and FREAK through the Brute Force and FLANN algorithms. It is possible to compute every combination of feature detector, descriptor and matcher to be able to easily compare and determine the best for the given input images. Finally the image of the object is located in the target image using homography, which is visualized by framing it in the target image. This is done mainly using OpenCV (3.4.2). Different can be used, however it cannot be guaranteed that all feature matching approaches will work. SURF for example is not available for OpenCV versions higher than 3.4.2.
- Python 2.7 or Python 3.4-3.7
To install the dependencies run:
pip install -r requirements.txt
python main.py --detector <detector> --descriptor <descriptor> --matcher <matcher>
| Arguments | Info |
|---|---|
-h, --help |
Show help message and exit |
--detector |
Specify SIFT or SURF or KAZE or ORB or BRISK or AKAZE |
--descriptor |
Specify SIFT or SURF or KAZE or BRIEF or ORB or BRISK or AKAZE or FREAK |
--matcher |
Specify BF or FLANN |
--all |
Run all combinations of detector, descriptor and matcher |
If no arguments are given or one of the arguments (detector, descriptor or matcher) is missing, it defaults to run all combinations.
python main.py --help
python main.py --detector ORB --descriptor ORB --matcher BF
python main.py
python main.py --all
-
KRIG, Scott. Computer vision metrics: Survey, taxonomy, and analysis. Apress, 2014.
Code released under the MIT license.