[1].Dong X, Yu B, Shi Z, et al.
Time-Varying Formation Control for Unmanned Aerial Vehicles: Theories and Applications[J].
Control Systems Technology IEEE Transactions on, 2015, 23(1):340-348.
[2].Wang H.
Second-Order Consensus of Networked Thrust-Propelled Vehicles on Directed Graphs[J].
IEEE Transactions on Automatic Control, 2016, 61(1):222-227.
Model:
Model is TPV, the input controller are thrust and angular acceleration along three axis. Please go to model.m for details.
just run main.m ;
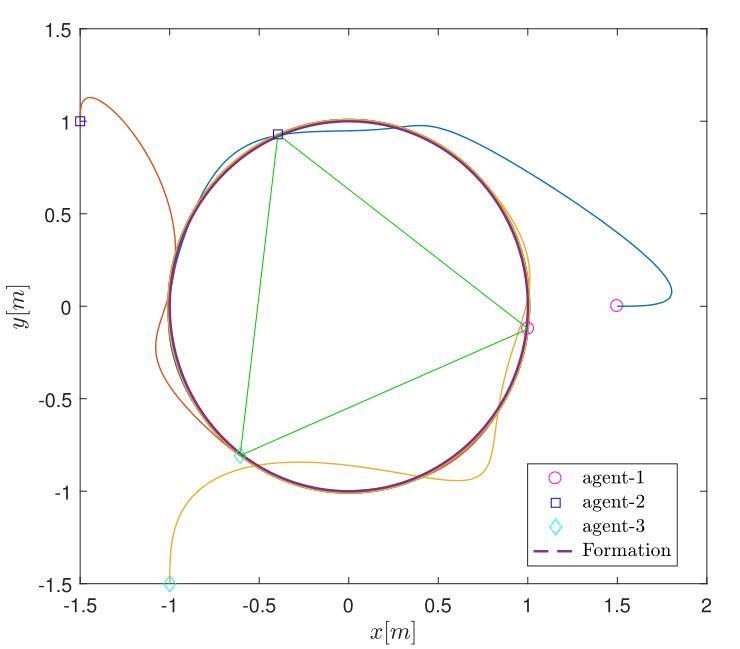
- flag = 0 : Formation is circle;
- flag = 1 : Formation is parabolic;
- flag = 2 : test for consensus.
- flag = 0:
ZYS:
 WHL:
WHL:

- flag = 1:
ZYS:
 WHL:
WHL:

- flag = 2:
ZYS:
 WHL:
WHL:






