行为克隆
(点击查看b站视频)
数据集和模拟器和训练好的模型都可以在这里下载:link
数据集是我跑了很多圈记录下来的数据,数据集包括实时左中右三个摄像头的截图和当前的速度方向等数据。
模拟器是 Udacity 提供的,用了 Unity3D 游戏引擎。
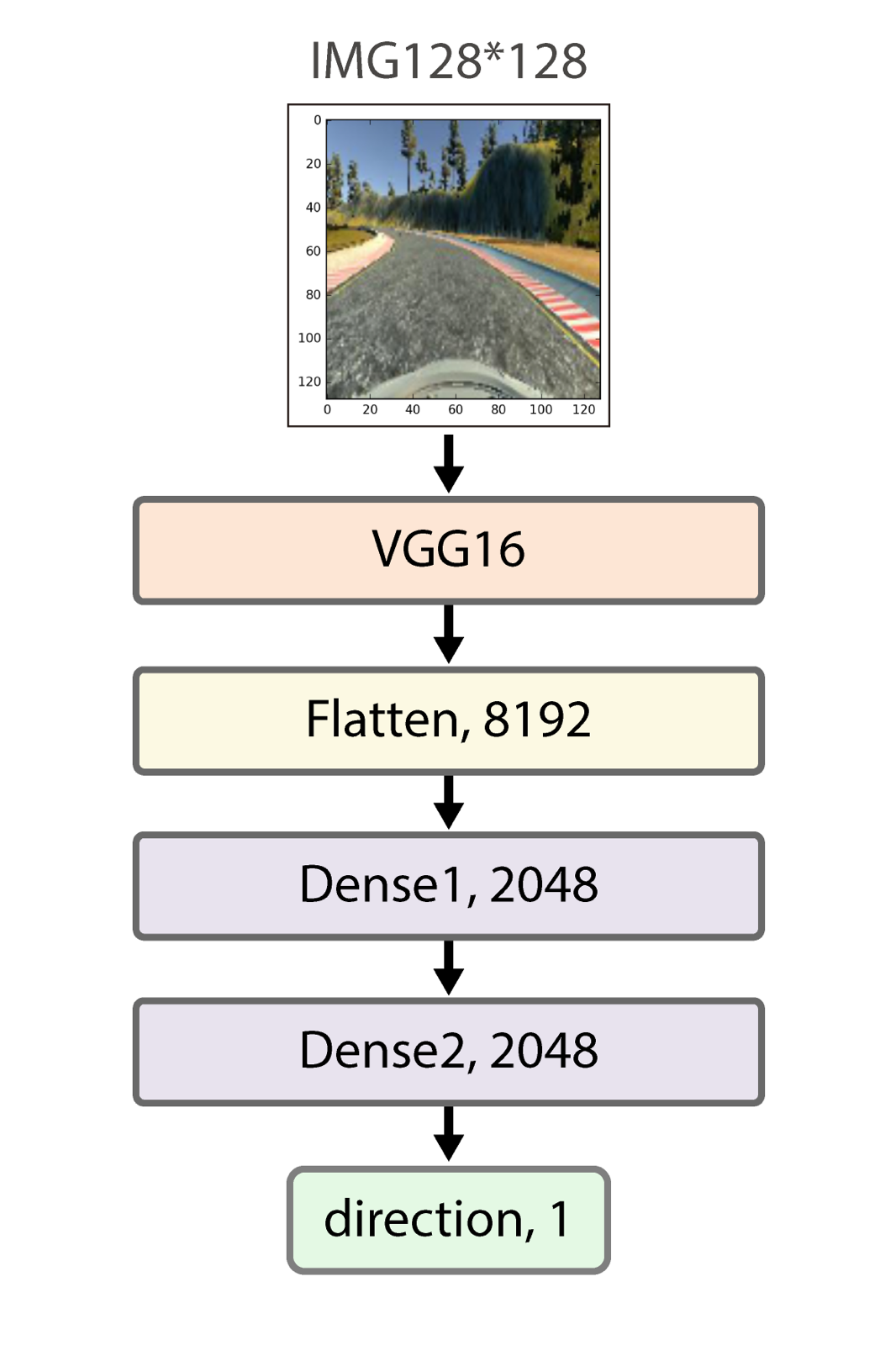
采用带 image-net 预训练权重的 VGG16 作为网络的特征采集层
通过两层 2048 个节点的全连接隐藏层和一个神经元输出的结构
学习当前图像对应的方向盘摆幅。
行为克隆
(点击查看b站视频)
数据集和模拟器和训练好的模型都可以在这里下载:link
数据集是我跑了很多圈记录下来的数据,数据集包括实时左中右三个摄像头的截图和当前的速度方向等数据。
模拟器是 Udacity 提供的,用了 Unity3D 游戏引擎。
采用带 image-net 预训练权重的 VGG16 作为网络的特征采集层
通过两层 2048 个节点的全连接隐藏层和一个神经元输出的结构
学习当前图像对应的方向盘摆幅。