{kind=link}
{kind=link}
{kind=link}
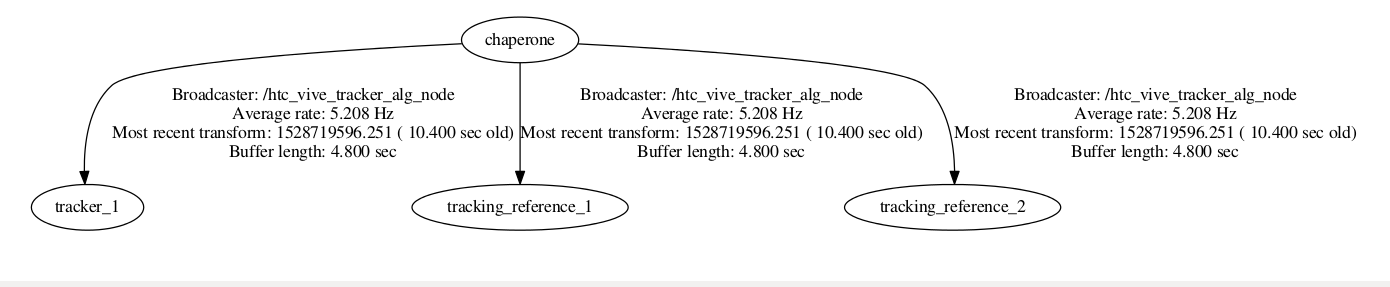
Publishes all the devices positions and orientations as a tf tree. The parent of the tree is called the chaperone. The coordinate system is the following
Use the functions from HandEyeMatlab
This returns the two transforms (base-world and hand-eye) , you can then print it and add it to your launch file
Check the launch file example
Folllow the download and install instructions from the htc_vive_tracker repository.
Folllow the download and install instructions from the iri_wam_dmp_tracker repository.
sudo apt-get install ros-kinetic-robot-localization
To test the WAM following a tracker demo do the following :
roslaunch iri_htc_vive_tracker wam_follow_device.launch device:=tracker_1
roslaunch iri_wam_bringup iri_wam_bringup.launch
roslaunch iri_wam_dmp_tracker iri_wam_dmp_tracker.launch
![]()
