Convert
python convert.py INPUT OUTPUT [--input-format INPUT_FORMAT] [--output-format OUTPUT_FORMAT]
Visualize
For visualize, it require open3d package.
pip install open3d
python visualize.py INPUT [--input-format INPUT_FORMAT]
It supports (not bounds yet)
- COLMAP (sparse)
- LLFF, NeRF (poses_bounds.npy)
TODO
- bounds support
- Instant-NGP, NerfStudio (transforms.json)
- Kubric (metadata.json)
- custom
X-to-Y: Move some position represented in X space to Y space
- Camera position in world space:
$p$ - Translation vector:
$t$ - Rotation matrix:
$R$
when R is orthogonal,
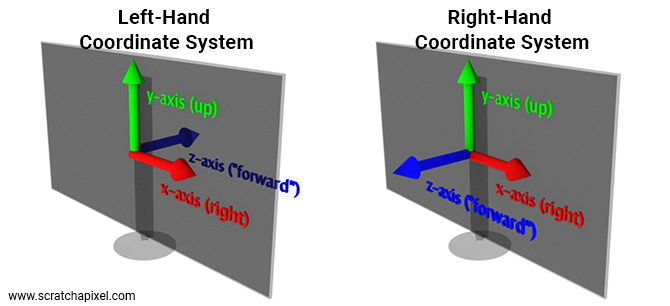
All poses should be considered with camera space and world space. Basically right-hand coordinate system (right-up-forward) is used in this repo.
Focal lengths are represented by pixel unit.
For inner implementation, it uses
- Camera space: +X, -Y, -Z
- World space: +X, -Y, -Z
COLMAP (sparse) Reference
- Camera space: +X, -Y, -Z
- World space: +X, -Y, -Z
It consists of 3 txt files.
cameras.txt
Intrinsic of cameras. In monocular camera setting, only one camera exists.
# Camera list with one line of data per camera:
# CAMERA_ID, MODEL, WIDTH, HEIGHT, PARAMS[]
# Number of cameras: 3
1 SIMPLE_PINHOLE 3072 2304 2559.81 1536 1152
2 PINHOLE 3072 2304 2560.56 2560.56 1536 1152
3 SIMPLE_RADIAL 3072 2304 2559.69 1536 1152 -0.0218531
images.txt
Extrinsic of cameras. World-to-Camera.
Image list with two lines of data per image:
# IMAGE_ID, QW, QX, QY, QZ, TX, TY, TZ, CAMERA_ID, NAME
# POINTS2D[] as (X, Y, POINT3D_ID)
# Number of images: 2, mean observations per image: 2
1 0.851773 0.0165051 0.503764 -0.142941 -0.737434 1.02973 3.74354 1 P1180141.JPG
2362.39 248.498 58396 1784.7 268.254 59027 1784.7 268.254 -1
2 0.851773 0.0165051 0.503764 -0.142941 -0.737434 1.02973 3.74354 1 P1180142.JPG
1190.83 663.957 23056 1258.77 640.354 59070
points3D.txt (optional)
# 3D point list with one line of data per point:
# POINT3D_ID, X, Y, Z, R, G, B, ERROR, TRACK[] as (IMAGE_ID, POINT2D_IDX)
# Number of points: 3, mean track length: 3.3334
63390 1.67241 0.292931 0.609726 115 121 122 1.33927 16 6542 15 7345 6 6714 14 7227
63376 2.01848 0.108877 -0.0260841 102 209 250 1.73449 16 6519 15 7322 14 7212 8 3991
63371 1.71102 0.28566 0.53475 245 251 249 0.612829 118 4140 117 4473
LLFF, NeRF (poses_bounds.npy) Reference
- Camera space: -Y, +X, -Z
- World space: +X, -Y, -Z
poses_bounds.npy
Camera parameters and bounds. Camera-to-World.
It has n x 17 matrices. (n=number of images)